Open-source software I've developed

Legged Contact Detection
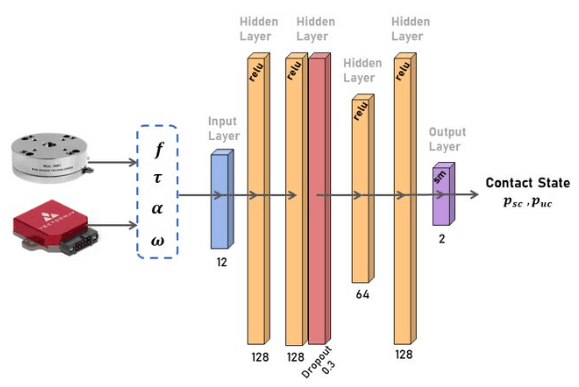
Legged Contact Detection (LCD) is a quality of contact estimation supervised deep learning framework for legged robots. It utilizes leg Force/Torque and IMU measurements to predict the probability of Stable Contact and Unstable Contact. LCD is implemented as a Python + PyTorch package.



WHOLE-BODY INVERSE KINEMATICS
Whole-Body Inverse Kinematics is a ROS1/C++ package that performs hierarchical task-based inverse kinematics at the velocity level for open-kinematic chains such as legged robots, by respecting joint positional and velocity constraints.
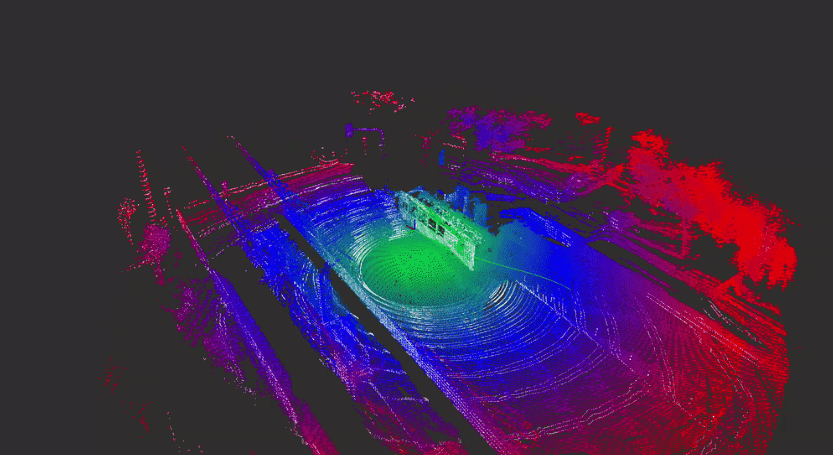
cublox
cublox is a standalone C/C++ and CUDA library for real-time 3D occupancy mapping. It maintains an ego-centric voxel grid centered on the robot and updates it incrementally from point clouds. When the robot drifts far enough from the grid origin, the map recenters on the GPU so the robot stays near the center of a fixed-size sliding window.